0731-85311818
内嵌高性能STM32芯片、电流电压高精度采集、高性能数字式双轴伺服驱动、适配多类电机

内嵌高性能STM32芯片,采用主流的 ARM Cortex-M4 内核,集成 DSP 和 FPU 功能,最高工作频率达 170 MHz,内置5个12位ADC、7个12位DAC,可为伺服驱动器提供高速并行操作能力、成熟稳定的实时控制能力,具备精度高、功耗小、外设集成度高、数据以及程序存储量大、A/D转换精确快速等特性
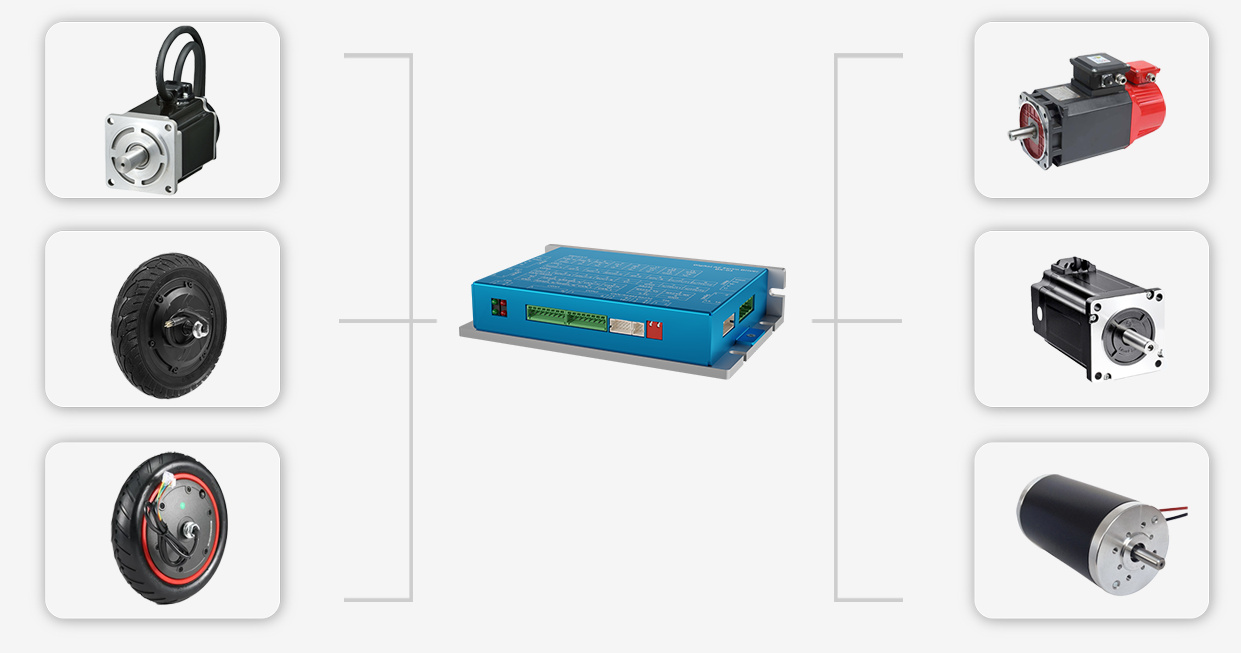
基于STM32高性能芯片平台,两侧各带一个电机控制接口,提供数字式高精度、高效率伺服驱动控制,可广泛应用于工业自动化、智能制造、教学科研等多个领域

可适配机器人主动轮、伺服电机、步进电机等多种电机型号,全面提升产品兼容性,满足不同应用场景需求
功率输出最大可达1800W,工作电压范围为24-60VDC,满足对多种电机位置、速度和力矩的精准控制需求,确保伺服驱动器在多类负载条件下都具备稳定可靠的运行能力
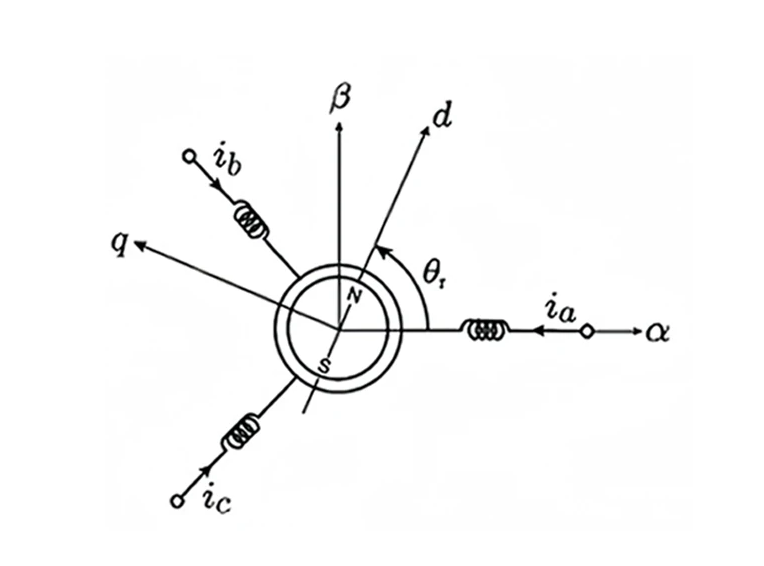
支持FOC、SVPWM等矢量控制算法,全面提高电机的动态性能,确保电机在各种工作条件下的高效、高精度运行
支持转矩、速度、位置等经典的控制模式,适应不同场景、不同控制精度应用的需要
支持开环控制和闭环控制、有感控制和无感控制等不同控制模型的选择,可实现切换模型无缝衔接
支持基于增量编码器、绝对值编码器、霍尔传感器、数字温度传感器等实现高精度有感控制,实现对电机扭矩、速度、位置等的灵敏感知。支持基于ADC的两相电流及三相电压高精度采集,实时量化电流、电压动态数据,确保实时动态响应,提供实时、精确的控制信息,控制更精准,响应更实时

提供防反接、输入欠压与过压、输出短路与过流、过载、温度监控、安全隔离、LED警示灯等多重安全保护,为电源安全稳定运行提供智能化、多层次的安全防护体系

| 基本参数 | ||||
|---|---|---|---|---|
| 产品名称 | DX-03 高精度伺服驱动器 | 产品尺寸(WxDxH) | 155x97x32mm | |
| 工作环境温度 | -10-50℃ | 最高环境湿度 | 90%Rh(无结露) | |
| 存储温度 | -10-70℃ | 使用场合 | 避免粉尘、油雾及腐蚀性气体 | |
| 轴数 | ||||
| 轴数 | 单轴、双轴 | |||
| 适配电机类型 | ||||
| 适配电机 | 机器人主动轮、伺服电机、步进电机 | |||
| 电气特性 | ||||
| 工作电压 | 24-60VDC | 额定电流 | 15A | |
| 峰值电流 | 30A | |||
| 主回路控制模式 | ||||
| 主回路控制模式 | SVPWM控制 | |||
| 控制模式 | ||||
| 总线控制 | CAN总线模式 | |||
| 位置控制 |
指令平滑方式:低通平滑滤波;S 曲线平滑滤波;动态均值滤波 扭矩限制:参数设定方式 前馈补偿:参数设定方式 |
|||
| 速度控制 | 指令平滑方式:低通平滑滤波;S 曲线平滑滤波;动态均值滤波 | |||
| 扭矩控制 | 指令平滑方式:低通平滑滤波;S 曲线平滑滤波;动态均值滤波 速度限制:参数设定方式或模拟输入 |
|||
| 混合模式控制 | 支持位置、速度、转矩任两种模式切换 | |||
| 通讯方式 | ||||
| CAN、RS485、RS232 | ||||
| 功能 | ||||
| 防反接保护 | 提供 | 过流保护 | 提供 | |
| 欠压保护 | 提供 | 过载保护 | 提供 | |
| 过压保护 | 提供 | 安全隔离保护 | 提供 | |
| 输出短路保护 | 提供 | 温度监控 | 提供 | |
| 警示灯保护 | 提供 | |||
| I/O | ||||
| 数字量输入 | 6路光耦隔离输入 | |||
| 数字量输出 | 6路光耦隔离输出 | |||
| 编码器输出接口 | 编码器隔离单端输出 | |||
| 通信接口 | CAN总线控制,通过CAN、RS485、RS232进行参数读取、修改、备份、简单控制 | |||
![]()
![]()
![]()
![]()
![]()
![]() 0731-85311818
0731-85311818
![]() 0731-85311818
0731-85311818
![]() bot@botxfoundry.com
bot@botxfoundry.com
![]() 410000
410000
![]() 湖南省长沙市雨花区英维创新大厦9层
湖南省长沙市雨花区英维创新大厦9层
湖南灵牛机器人科技有限公司 版权所有